近日,同济大学(Tongji University)钟再敏、王业勤团队以《准同步运行双馈直线电机定子磁场定向方法研究》为题在《电机与控制应用》上发表最新研究论文,第一作者为陈鸿,通信作者为王业勤。
面向高速磁浮应用的双馈直线电机(DFLM)采用准同步运行(QSO)控制框架,定子侧采用标量控制,动子侧采用矢量控制。然而,磁场定向作为DFLM-QSO的基础,面临两大挑战:1)在悬浮工况下,动子磁动势远强于定子磁动势,定子磁场常被动子磁场淹没,导致定子磁场角度难以精准获取;2)为维持交流悬浮宽频稳定,动子电流中需注入谐波,要求磁场定向方法具备优异的动态性能。
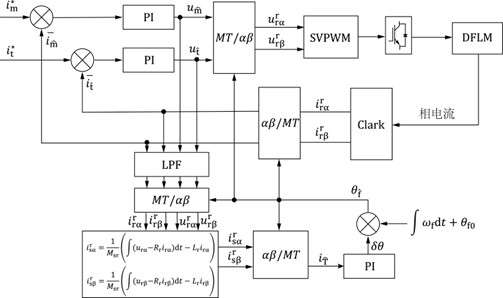
针对这些问题,本文提出了一种基于动子固结α-β坐标系的定子磁场定向方法及相应的参数校正方案。如图1所示,该方法在α-β坐标系下实时估算定子电流,并通过闭环调节动子磁场同步坐标系的方位角,使定子电流T轴分量收敛至零,从而实现磁场定向。同时,设计的参数校正方法有效提升动子侧参数精度,使动子绕组中较小的定子感应电压得以精确提取。此外,该方法动态性能好,即使在动子电流谐波注入的情况下,亦能保持稳定的磁场定向效果。
图1 定子磁场定向方法框图
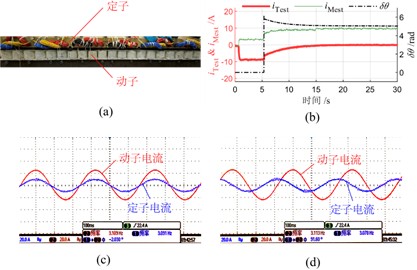
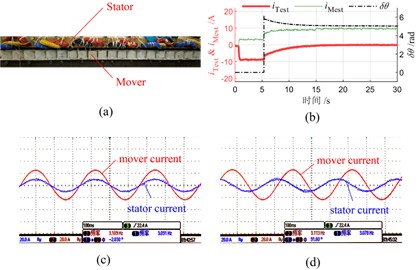
实验结果进一步证明了本方法的有效性。如图2所示,在磁场定向过程中,定子电流T轴分量收敛并稳定至0 A。当定子和动子参考电流矢量角度分别为0°和90°时,示波器波形显示二者相位差准确保持在0°与90°,实现了定子磁场的精准定向。
图2 磁场定向验证实验
本研究有效解决了高速磁浮工况下DFLM的定子磁场定向难题,为实现牵引、悬浮与馈电解耦控制奠定了坚实基础,具有重要的理论意义与工程应用价值。
Research on Stator Magnetic Field Orientation Method for Quasi-Synchronous Operation of Doubly-Fed Linear Motor
Based on the analysis of aerodynamic noise characteristics and acoustic tests of self-ventilated traction motors, the main noise sources were determined, the steady-state
For high-speed maglev applications, the doubly-fed linear motor (DFLM) adopts a quasi-synchronous operation (QSO) control framework, with scalar control on the stator side and vector control on the mover side. However, as the basic requirement of the DFLM-QSO, the magnetic field orientation faces two major challenges. Firstly, under levitation conditions, the mover’s magnetic motive force (MMF) is significantly stronger than that of the stator, causing the stator’s magnetic field to be overwhelmed by the mover’s, and making it difficult to accurately determine the stator’s magnetic field angle. Secondly, to maintain wideband stability in AC levitation, harmonic injection is required in the mover current, necessitating a magnetic field orientation method with superior dynamic performance.
To address these challenges, this paper proposes a novel stator magnetic field orientation method based on a mover-consolidated α-β coordinate system, along with a corresponding parameter correction scheme. As shown in Figure 1, this method estimates the stator current in real time within the α-β coordinate system and adjusts the orientation angle of the mover’s synchronous magnetic field coordinate system through the closed-loop control, ensuring that the T-axis component of the stator current converges to zero, thereby achieving magnetic field orientation. Additionally, the parameter correction method enhances the accuracy of mover-side parameters, enabling precise extraction of the stator’s induced voltage within the mover windings, even when the induced voltage is relatively small. This method demonstrates excellent dynamic performance, maintaining stable magnetic field orientation even under harmonic injection in the mover current.
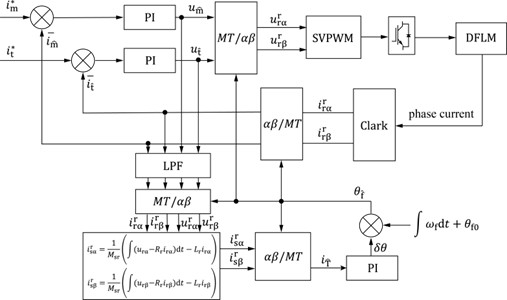
Figure.1 Block diagram of stator magnetic field orientation method
Experimental results further validate the effectiveness of this approach. As illustrated in Figure 2, the T-axis component of the stator current converges and stabilizes at 0 A during the magnetic field orientation process. When the reference current vector angles of the stator and mover are set to 0° and 90°, respectively, the oscilloscope waveforms show that the phase difference between the two currents remains precisely at 0° and 90°, confirming the accurate orientation of the stator’s magnetic field.
Figure.2 Magnetic field orientation verification experiment
This study effectively resolves the challenge of stator magnetic field orientation in DFLMs under high-speed maglev conditions, laying a solid foundation for decoupled control of traction, levitation, and power supply. It holds significant theoretical value and engineering potential for future high-speed maglev systems.
--本文由作者团队供稿
支持基金:
National Natural Science Foundation of China (52202448)
论文链接:
http://www.motor-abc.cn/djykzyy/article/abstract/20241101
推荐引用格式:
陈鸿, 王修森, 王业勤, 钟再敏. 准同步运行双馈直线电机定子磁场定向方法研究[J]. 电机与控制应用, 2024, 51(11): 1-10.
CHEN Hong, WANG Xiusen, WANG Yeqin, ZHONG Zaimin. Research on Stator Magnetic Field Orientation Method for Quasi-Synchronous Operation of Doubly-Fed Linear Motor[J]. Electric Machines & Control Application, 2024, 51(11): 1-10.

陈鸿于2023年获得同济大学汽车学院学士学位,他目前正在同济大学汽车研究学院攻读硕士学位。他目前的研究方向为电机控制。
Hong Chen received the B.S. degree from the School of Automotive Studies, Tongji University, in 2023. He is currently pursuing the M.S. degree with the School of Automotive Studies, Tongji University. His current research interests include motor control.

王修森于2021年获得同济大学汽车学院学士学位,他目前正在同济大学汽车研究学院攻读博士学位。他目前的研究方向为电机控制。
Xiusen Wang received the B.S. degree from the School of Automotive Studies, Tongji University, in 2021. He is currently pursuing the Ph.D. degree with the School of Automotive Studies, Tongji University. His current research interests include motor control.

王业勤分别于2009年获得中国农业大学工学院学士学位,2012年获得同济大学汽车学院硕士学位,2019年获得美国德州理工大学国家风能学院博士学位。他目前于同济大学汽车研究学院担任助理教授。他目前的研究方向为电驱动、电力电子控制。
Yeqin Wang received the B.Eng. degree from the College of Engineering, China Agricultural University, in 2009, the M.Eng. degree from the School of Automotive Studies, Tongji University, in 2012, and the Ph.D. degree from the National Wind Institute, Texas Tech University, USA, in 2019. He is currently an Assistant Professor with the School of Automotive Studies, Tongji University. His current research interests include electric drive system and power electronics control.

钟再敏分别于1995和2000年获得北京理工大学车辆工程学士学位和博士学位。他目前于同济大学汽车研究学院担任教授。他目前的研究方向为车用电驱动、轨道交通电气化。
Zaimin Zhong received the B.S. and Ph.D. degrees in vehicle engineering from the Beijing Institute of Technology, Beijing, China, in 1995 and 2000, respectively. He is currently a Professor at Tongji University. His current research interests include automotive electric drive and transportation electrification.